3,648 Views
3,648 Viewsหุ่นยนต์ในประเทศไทยมีการพัฒนาอย่างต่อเนื่องทั้งในรูปของงานวิจัยขั้นพื้นฐานและที่นำไปประยุกต์ใช้ในเชิงอุตสาหกรรม การแพทย์ และการสร้างนวัตกรรมในเชิงสิ่งประดิษฐ์ต่าง ๆ จากการแข่งขันประดิษฐ์หุ่นยนต์ซึ่งผลงานวิจัยทางด้านหุ่นยนต์ที่น่าสนใจและถูกบันทึกไว้ คือ
ในพ.ศ. ๒๔๙๗ พระบาทสมเด็จพระเจ้าอยู่หัว เสด็จฯ ทรงเปิดงานศิลปหัตถกรรมนักเรียนที่โรงเรียนสวนกุหลาบวิทยาลัยและมีพระราชประสงค์ที่จะสร้าง "หุ่นยนต์คุณหมอพระราชทาน" และโปรดเกล้าฯ ให้อาจารย์สนั่น สุมิตร ผู้อำนวยการวิทยาลัยเทคนิคกรุงเทพฯ (ปัจจุบันคือมหาวิทยาลัยเทคโนโลยีราชมงคลกรุงเทพ) อาจารย์สวัสดิ์ หงส์พร้อมญาติ และคณาจารย์ของวิทยาลัยเทคนิคกรุงเทพฯ เป็นผู้รับผิดชอบในการสร้างโดยทรงพระกรุณาโปรดเกล้าฯ พระราชทานพระราชทรัพย์ส่วนพระองค์จำนวน ๒๐,๐๐๐ บาท เมื่อหุ่นยนต์คุณหมอพระราชทานสร้างเสร็จแล้วพระบาทสมเด็จพระเจ้าอยู่หัวมีพระราชกระแสรับสั่งให้นำไปจัดแสดงในงานกาชาดที่สถานเสาวภา หุ่นยนต์คุณหมอพระราชทานเป็นหุ่นยนต์ตัวแรกของโลกที่มีรูปร่างคล้ายคนขนาดเท่าคนจริงและแต่งกายแบบหมอ สามารถเดิน ยกมือไหว้ พูด ฟัง และโต้ตอบได้ อีกทั้งทำงานหลายอย่างได้เป็นอย่างดี ต่อมาพระบาทสมเด็จพระเจ้าอยู่หัวทรงพระกรุณาโปรดเกล้าฯ พระราชทานหุ่นยนต์คุณหมอนี้ให้แก่วิทยาลัยเทคนิคกรุงเทพฯ เพื่อใช้ประกอบการเรียนการสอน นับว่าพระราชดำริเรื่องหุ่นยนต์คุณหมอพระราชทานของพระบาทสมเด็จพระเจ้าอยู่หัวเป็นสิ่งที่มีคุณค่ายิ่งในประวัติศาสตร์ของหุ่นยนต์ไทย

เทคโนโลยีและงานวิจัยทางด้านหุ่นยนต์ที่น่าสนใจในประเทศไทยปัจจุบันสามารถแบ่งออกเป็น ๓ กลุ่ม คือ
ตัวอย่างงานวิจัยในกลุ่มนี้ ได้แก่ หุ่นยนต์บิน หุ่นยนต์เดิน ๒ ขาคล้ายมนุษย์ หุ่นยนต์สำรวจใต้น้ำ และหุ่นยนต์อุตสาหกรรมจัดเก็บหางเหล็ก
หุ่นยนต์บิน
โดยห้องปฏิบัติการเมคาทรอนิกส์และอัตโนมัติสำนักวิทยาการเทคโนโลยีขั้นสูง สถาบันเทคโนโลยีแห่งเอเซีย (เอไอที) เป็นงานวิจัยที่เน้นการออกแบบและควบคุมหุ่นยนต์บินได้อย่างอัตโนมัติโดยหุ่นยนต์บินมีลักษณะเป็นเฮลิคอปเตอร์ที่ติดตั้งอุปกรณ์ตรวจรู้หลายประเภท เช่น อัลตราโซนิกส์ จีพีเอส อุปกรณ์วัดความเร็วเชิงมุม อุปกรณ์วัดความเร็วมุมเอียง งานวิจัยนี้สามารถนำไปประยุกต์ใช้ในงานด้านการสำรวจ การทหาร และการเกษตรกรรม
หุ่นยนต์เดิน ๒ ขาคล้ายมนุษย์
โดยสถาบันวิทยาการหุ่นยนต์ภาคสนาม (ฟีโบ้) มหาวิทยาลัยเทคโนโลยีพระจอมเกล้าธนบุรี เป็นงานวิจัยที่ศึกษาเกี่ยวกับพลศาสตร์ของหุ่นยนต์เดิน ๒ ขาที่มีลักษณะคล้ายมนุษย์โดยเน้นในเรื่องกลไกการเดินและการทรงตัวของหุ่นยนต์ การลดแรงกระแทกจากการก้าวเดินและการออกแบบระบบตรวจวัดและระบบควบคุมเสถียรภาพรวมทั้งการใช้ระบบคอมพิวเตอร์ประมวลผลภาพของหุ่นยนต์ในการนำทางและคำนวณตำแหน่งของหุ่นยนต์งานวิจัยนี้สามารถนำไปประยุกต์ใช้ในการทำขาเทียมเพื่อช่วยเหลือผู้พิการ

หุ่นยนต์สำรวจใต้น้ำไทยเอ็กซ์โพล (Thai-XPole)
โดยสำนักงานเครือข่ายวิจัยประยุกต์ทางเทคโนโลยีหุ่นยนต์และชีวการแพทย์ คณะวิศวกรรมศาสตร์ มหาวิทยาลัยมหิดล เป็นงานวิจัยและพัฒนาหุ่นยนต์สำรวจใต้น้ำเพื่อช่วยในการสำรวจและเก็บข้อมูลการร่วมสำรวจบริเวณขั้วโลกใต้ของนักวิทยาศาสตร์ไทย
หุ่นยนต์อุตสาหกรรมจัดเก็บหางเหล็ก (Crop Collector system)
โดยสถาบันวิทยาการหุ่นยนต์ภาคสนาม (ฟีโบ้) มหาวิทยาลัยเทคโนโลยีพระจอมเกล้าธนบุรีกับบริษัทเหล็กสยามยามาโตะจำกัดเป็นงานวิจัยเกี่ยวกับการออกแบบและจัดสร้างหุ่นยนต์อุตสาหกรรมอัตโนมัติขนาดใหญ่เพื่อใช้ในสายการผลิตเหล็กรูปพรรณโดยพัฒนาหุ่นยนต์ขนาดใหญ่เพื่อให้สามารถเก็บหางเหล็กที่มีน้ำหนักมากและมีความร้อนสูงแล้วนำไปทิ้งภายในเวลาที่กำหนดในการจัดสร้างหุ่นยนต์ดังกล่าวทำให้เครื่องจักรของบริษัทสามารถผลิตเหล็กได้อย่างเต็มกำลังและเพิ่มผลผลิตให้แก่บริษัทได้ตามต้องการ
เป็นการนำเทคโนโลยีมาประยุกต์ใช้กับหุ่นยนต์เพื่อให้ทำงานร่วมกับมนุษย์ได้อย่างมีประสิทธิภาพช่วยเหลือมนุษย์ในการทำงานต่าง ๆ ในชีวิตประจำวัน รวมทั้งช่วยเหลือผู้พิการและงานทางการแพทย์ ตัวอย่างงานวิจัยกลุ่มนี้ในประเทศไทย ได้แก่ หุ่นยนต์โคบอต ชุดสวมแขนขาสำหรับผู้พิการ การใช้สัญญาณชีวภาพในการควบคุมหุ่นยนต์และระบบนำทางการผ่าตัด
หุ่นยนต์โคบอตสามมิติ (3D Cobot)
โดยห้องปฏิบัติการสหวิทยาการมนุษย์และหุ่นยนต์ ภาควิชาวิศวกรรมเครื่องกล คณะวิศวกรรมศาสตร์ จุฬาลงกรณ์มหาวิทยาลัย งานวิจัยนี้เกี่ยวกับการออกแบบและพัฒนาหุ่นยนต์โคบอตแบบแขนกลซึ่งสามารถเคลื่อนที่ได้ ๓ องศาอิสระ ที่มีลักษณะเป็นแบบเชิงเส้นตามแนวแกน X, Y และ Z
ชุดสวมแขนและขา (Arm and Leg ExoskeletonX)
โดยห้องปฏิบัติการเมคาทรอนิกส์และอัตโนมัติสำนักวิทยาการเทคโนโลยีขั้นสูงสถาบันเทคโนโลยีแห่งเอเซียเป็นงานวิจัยที่เน้นการออกแบบและพัฒนาต้นแบบชุดสวมแขนและขาเพื่อช่วยให้ผู้พิการแขนสามารถควบคุมแขนกลให้หยิบจับสิ่งของหรือช่วยให้ผู้พิการขาสามารถเดินได้

การควบคุมแขนหุ่นยนต์โดยใช้สัญญาณไฟฟ้าทางชีวภาพ
โดยสถาบันวิทยาการหุ่นยนต์ภาคสนามมหาวิทยาลัยเทคโนโลยีพระจอมเกล้าธนบุรี งานวิจัยนี้เสนอการนำสัญญาณไฟฟ้าทางชีวภาพที่เกิดขึ้นจากอากัปกิริยาต่าง ๆ บนใบหน้า เช่น การกลอกตา การยักคิ้ว มาวิเคราะห์เพื่อทำการเรียนรู้และจดจำรูปแบบของสัญญาณเหล่านั้นโดยมีส่วนประมวลผลเบื้องต้นเพื่อจัดสัญญาณไฟฟ้าทางชีวภาพให้อยู่ในรูปแบบที่สามารถนำไปเรียนรู้และจดจำสัญญาณไว้ก่อนหลังจากนั้นจึงนำผลที่ได้มาใช้ควบคุมแขนหุ่นยนต์
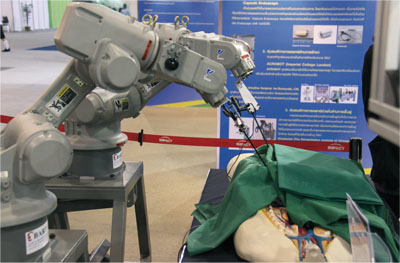
ระบบนำทางการผ่าตัด
โดยสำนักงานเครือข่ายวิจัยประยุกต์ทางเทคโนโลยีหุ่นยนต์และชีวการแพทย์ คณะวิศวกรรมศาสตร์ มหาวิทยาลัยมหิดล เป็นงานวิจัยที่เกี่ยวกับการพัฒนาระบบนำทางเพื่อช่วยในการผ่าตัดโดยพยายามลดการฉายแสงรวมทั้งพัฒนาระบบหุ่นยนต์ช่วยในการผ่าตัด
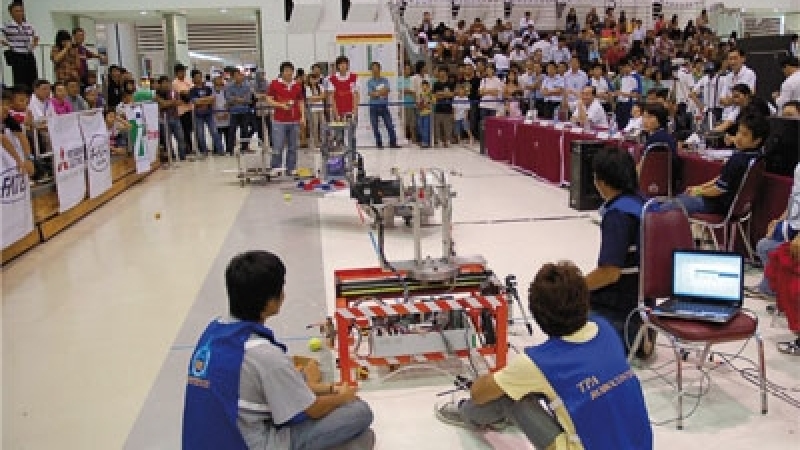
การแข่งขันหุ่นยนต์ในแต่ละครั้งนอกจากผู้เข้าร่วมการแข่งขันจะได้รับความสนุกสนานแล้วยังสามารถนำทักษะความรู้ทางด้านวิทยาศาสตร์และเทคโนโลยีมาประยุกต์ใช้ในการประดิษฐ์หุ่นยนต์อีกด้วยโดยนวัตกรรมด้านหุ่นยนต์หลาย ๆ อย่างก็ได้เกิดขึ้นจากการแข่งขันหุ่นยนต์นี้