9,283 Views
9,283 Views ในหุ่นยนต์ ๑ ตัวประกอบด้วยอุปกรณ์และชิ้นส่วนต่าง ๆ มากมายซึ่งอุปกรณ์แต่ละชนิดมีหน้าที่แตกต่างกันตามลักษณะและวัตถุประสงค์ของการใช้งาน การเลือกใช้อุปกรณ์และชิ้นส่วนต่าง ๆ จึงจำเป็นต้องอาศัยความรู้ ความเข้าใจ รวมถึงความเหมาะสมเพื่อให้หุ่นยนต์สามารถทำงานได้อย่างมีประสิทธิภาพ รวดเร็ว คงทน และประหยัดพลังงาน
หุ่นยนต์แบ่งส่วนประกอบใหญ่ๆ ออกเป็น ๔ ส่วน ได้แก่
๑. อุปกรณ์ทางกล (mechanic)
๒. อุปกรณ์ขับเร้า (actuator)
๓. อุปกรณ์ไฟฟ้าหรืออุปกรณ์อิเล็กทรอนิกส์ (electronic equipment)
๔. อุปกรณ์ควบคุม (controller)

คือ ชิ้นส่วนกลไกต่าง ๆ ของหุ่นยนต์ เช่น โครงสร้าง เพลา เฟือง สกรูส่งกำลัง สายพาน โซ่ สปริง ข้อต่อสวมเพลา คลัตช์ เบรก ข้อต่อ ก้านต่อโยง ตลับลูกปืนและปลอกสวม
โครงสร้าง (Frame)
โครงสร้างเป็นส่วนประกอบหลักของหุ่นยนต์ซึ่งทำหน้าที่ยึดจับอุปกรณ์ต่าง ๆ ในตัวหุ่นยนต์และยังป้องกันอุปกรณ์ต่าง ๆ ไม่ให้ได้รับอันตรายจากภายนอก โครงสร้างของหุ่นยนต์เปรียบได้กับโครงกระดูกของมนุษย์และมีลักษณะแตกต่างกันไปตามหน้าที่การทำงานและวัตถุประสงค์ของหุ่นยนต์นั้น ๆ เช่น หุ่นยนต์ทรงกลมที่สร้างขึ้นเพื่อศึกษาลักษณะการกลิ้งจะออกแบบโครงสร้างของหุ่นยนต์ให้มีลักษณะเหมือนลูกบอลแต่หากหุ่นยนต์ถูกสร้างขึ้นมาเพื่อเลียนแบบการทำงานหรือการเคลื่อนที่ของสิ่งมีชีวิตโครงสร้างนั้นก็จะถูกออกแบบมาให้มีลักษณะคล้ายกับสิ่งมีชีวิตชนิดนั้น ๆ โดยแสดงโครงสร้างขาของหุ่นยนต์เลียนแบบขาของมนุษย์ วัสดุที่นิยมนำมาสร้างเป็นโครงสร้างของหุ่นยนต์ ได้แก่ อะลูมิเนียม เหล็ก พลาสติก ซึ่งการเลือกใช้วัสดุนั้นขึ้นอยู่กับลักษณะการนำไปใช้งาน เช่น หากต้องการสร้างหุ่นที่มีน้ำหนักเบาควรเลือกใช้อะลูมิเนียมเป็นวัสดุหลักนอกจากนี้การเลือกใช้วัสดุควรคำนึงถึงปัจจัยอื่น ๆ ประกอบด้วย เช่น กระบวนการผลิต ราคา

เพลา (Shaft)
เพลาเป็นชิ้นส่วนที่มีลักษณะเป็นก้านทรงกระบอกที่หมุนได้ใช้สำหรับการส่งถ่ายกำลังจากอุปกรณ์ขับเร้า เช่น มอเตอร์ไปยังส่วนที่เคลื่อนไหวของหุ่นยนต์ เพลาเป็นชิ้นส่วนที่สำคัญมากในหุ่นยนต์ที่เคลื่อนไหวได้ทุกชนิดนอกจากเพลาแล้วยังมีแกน (axle) ซึ่งมีลักษณะเดียวกันกับเพลาแต่ไม่สามารถหมุนได้ทำหน้าที่รองรับชิ้นส่วนที่หมุน เช่น ล้อ
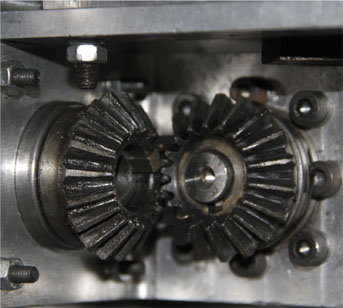
เฟือง (Gear)
เฟืองทำหน้าที่ส่งกำลังจากเพลาหนึ่งไปยังอีกเพลาหนึ่งโดยใช้การขบกันของฟันเฟืองในการส่งถ่ายกำลังของเฟืองนั้นจะประกอบไปด้วยเฟือง ๒ ตัว ที่ขบกันอยู่ โดยมีเฟืองขับ (driving gear) หรือพิเนียน (pinion) เป็นตัวหมุนส่งกำลังให้แก่เฟืองตาม (driven gear) เฟืองที่นิยมใช้ในหุ่นยนต์มีอยู่หลายชนิดซึ่งเฟืองแต่ละชนิดสามารถจำแนกได้ตามลักษณะของฟัน ได้แก่ เฟืองตรง เฟืองเฉียง เฟืองดอกจอก และชุดเฟืองหนอน

สกรูส่งกำลัง (Power screw)
สกรูส่งกำลังมีหน้าที่ส่งกำลังโดยเปลี่ยนจากการหมุนเป็นการเลื่อน มีอัตราการทดของเฟืองที่สูงมากจึงสามารถใช้ในการส่งถ่ายกำลังได้ดีนิยมใช้ในงานที่ต้องแบกรับน้ำหนักมาก ๆ
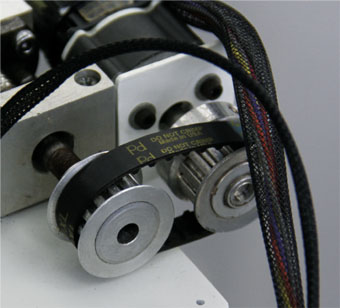
สายพาน (Belt)
สายพานมีหน้าที่ส่งกำลังจากเพลาหนึ่งไปยังอีกเพลาหนึ่งเช่นเดียวกับเฟืองแต่สายพานมีสมบัติเฉพาะตัว คือ อ่อนตัวได้สามารถรับแรงกระตุกและแรงสั่นได้ดีกว่าเฟือง เสียงเบากว่า แต่ก็มีข้อเสีย คือ อัตราทดไม่แน่นอนเนื่องจากการไถลตัวของสายพานและไม่สามารถรับอัตราทดที่สูงได้ การส่งกำลังด้วยสายพานทำได้โดยติดตั้งวงล้อสายพานตั้งแต่ ๒ อันขึ้นไป โดยทั่วไปชนิดของสายพานที่นิยมใช้ในหุ่นยนต์ ได้แก่ สายพานแบนที่มีหน้าตัดขวางเป็นรูปสี่เหลี่ยมผืนผ้า สายพานกลมที่มีหน้าตัดขวางเป็นวงกลม สายพานลิ่มที่มีหน้าตัดขวางเป็นสี่เหลี่ยมคางหมู และสายพานฟันที่มีลักษณะเหมือนกับสายพานแบนแต่ที่สายพานจะมีฟันเพื่อใช้ขบกับวงล้อสายพานแบบเฟืองทำให้ไม่มีการลื่นไถล
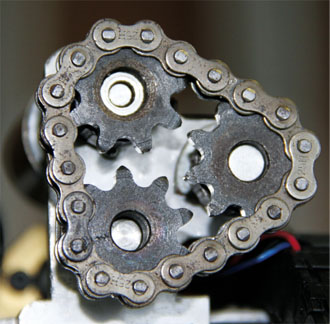
โซ่ (Chain)
โซ่มีหน้าที่ส่งกำลังจากเพลาหนึ่งไปยังอีกเพลาหนึ่งเช่นเดียวกับเฟืองและสายพานในการส่งกำลัง โซ่จะคล้องอยู่รอบเฟืองโซ่ตั้งแต่ ๒ อันขึ้นไป ซึ่งเฟืองโซ่เป็นล้อที่มีฟันรูปร่างพิเศษเพื่อรับกับร่องของโซ่ ในการขับด้วยโซ่นั้นข้อโซ่จะขบกับฟันของเฟืองโซ่จึงไม่มีการลื่นไถลทำให้การส่งกำลังมีอัตราทดคงที่เช่นเดียวกับการขับด้วยเฟืองแต่การติดตั้งไม่ต้องเที่ยงตรงเหมือนกับการติดตั้งเฟือง จึงเป็นที่นิยมกันมาก แต่ก็มีข้อเสียคือมีเสียงดัง
ข้อต่อ (Joint)
ข้อต่อเป็นอุปกรณ์ที่ใช้เชื่อมต่อชิ้นส่วนที่เคลื่อนที่อย่างสัมพันธ์กันของหุ่นยนต์โดยทั่วไปมี ๒ ชนิด คือ ข้อต่อหมุน (rotational joint) เป็นข้อต่อที่ต่อกับชิ้นส่วนที่เคลื่อนที่ในลักษณะที่มีการหมุนรอบข้อต่อและข้อต่อเชิงเส้น (linear joint) เป็นข้อต่อที่ต่อกับชิ้นส่วนที่เคลื่อนที่ในลักษณะเป็นเชิงเส้น เช่น เคลื่อนที่แบบไป-กลับในแนวเส้นตรงหรือโค้ง
สปริง (Spring)
สปริงเป็นชิ้นส่วนที่มีความยืดหยุ่นมีหน้าที่หลายอย่าง เช่น ส่งแรงจากชิ้นส่วนหนึ่งไปยังอีกชิ้นส่วนหนึ่ง รองรับแรงกระแทก เป็นแหล่งพลังงานให้แก่กลไก และยังมีหน้าที่ให้ชิ้นส่วนกลับคืนสู่ตำแหน่งเดิม สปริงที่นิยมใช้ในหุ่นยนต์ ได้แก่ สปริงขด สปริงขดแบบดึง สปริงขดแบบบิด สปริงแผ่น สปริงแหวน และสปริงลาน

ข้อต่อสวมเพลา (Coupling)
ข้อต่อสวมเพลาเป็นอุปกรณ์ซึ่งมีหน้าที่ส่งถ่ายแรงบิดระหว่างเพลา ๒ เพลา โดยเพลาที่ต่อกับต้นกำลังจะเป็นเพลาขับและอีกด้านหนึ่งเป็นเพลาตามข้อต่อสวมเพลาที่นิยมใช้กับหุ่นยนต์สามารถแบ่งออกได้ดังนี้
คลัตช์ (Clutch)
คลัตช์เป็นอุปกรณ์ที่มีหน้าที่ส่งถ่ายแรงบิดระหว่างเพลา ๒ เพลา เช่นเดียวกับข้อต่อสวมเพลาแต่สามารถตัดต่อกำลังในการส่งถ่ายได้ในขณะที่เพลากำลังหมุนอยู่ คลัตช์แบ่งเป็น ๒ ประเภทใหญ่ ๆ คือ คลัตช์ที่ใช้แรงเสียดทานระหว่างผิวสัมผัส (friction clutch) ได้แก่ คลัตช์แผ่น คลัตช์ลิ่ม คลัตช์ก้ามปู และคลัตช์แม่เหล็กไฟฟ้า คลัตช์ประเภทนี้จะเกิดการลื่นไถลได้ ทำให้ลดแรงกระแทกที่เกิดขึ้นที่ข้อต่อเพลา แต่มีข้อเสียคือมักเกิดความร้อนสูง ส่วนคลัตช์อีกประเภทหนึ่งคือคลัตช์ที่ไม่ใช้ความเสียดทานระหว่างผิวสัมผัส (positive contact clutch) ได้แก่ คลัตช์ที่ใช้วิธีการล็อกทางกลโดยตรง (direct mechanical lock-up) ข้อดีคือไม่มีการลื่นไถลทำให้ไม่เกิดความร้อน ส่วนข้อเสียคือไม่สามารถตัดต่อเพลาที่หมุนด้วยความเร็วรอบสูงได้และจะเกิดแรงกระแทกขึ้นทุกครั้ง


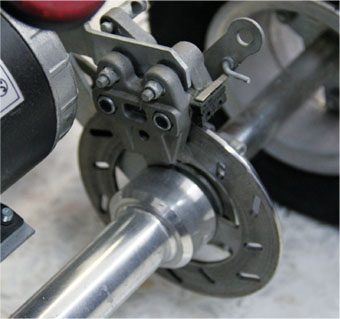
เบรก (Break)
เบรกเป็นอุปกรณ์ที่ใช้ควบคุมการเคลื่อนที่ของชิ้นส่วนทำให้การเคลื่อนที่ช้าลงหรือหยุดการเคลื่อนที่ของชิ้นส่วนนั้น ๆ ด้วยการใช้แรงเสียดทานระหว่างผิวสัมผัส เบรกแบ่งออกเป็น ๓ประเภทใหญ่ ๆ คือ เบรกแผ่นคาด เบรกก้ามปู และเบรกแบบจาน
ตลับลูกปืนและปลอกสวม (Bearing and Bush)
ตลับลูกปืนและปลอกสวมต่างก็เป็นอุปกรณ์ที่ใช้รองรับจุดหมุนหรือจุดต่าง ๆ ที่เคลื่อนที่ของหุ่นยนต์มีหน้าที่ลดแรงเสียดทานที่เกิดจากการเคลื่อนไหวของอุปกรณ์
ก้านต่อโยง (Link)
ก้านต่อโยงในที่นี้หมายถึง ชื่อเรียกชิ้นส่วนของวัตถุที่นำมาเชื่อมต่อเพื่อสร้างการเคลื่อนไหวของหุ่นยนต์ซึ่งหากนำก้านต่อโยงหลาย ๆ อันมาต่อรวมกันจะเรียกว่า กลไกก้านต่อโยง

คือ อุปกรณ์ที่สามารถเปลี่ยนแปลงพลังงานไฟฟ้าที่ป้อนเข้าให้กลายเป็นการกระจัด การเคลื่อนที่ หรือแรง เช่น มอเตอร์ไฟฟ้า ระบบนิวแมติก ระบบไฮดรอลิก
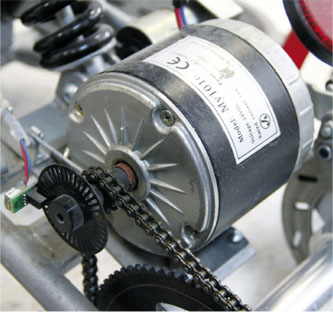
มอเตอร์ไฟฟ้า (Electric motor)
มอเตอร์ไฟฟ้าเป็นอุปกรณ์เปลี่ยนพลังงานไฟฟ้าเป็นพลังงานกลมีหน้าที่เป็นตัวขับกลไกต่าง ๆ ของหุ่นยนต์ให้เคลื่อนไหวเปรียบเสมือนกล้ามเนื้อของมนุษย์ที่มีหน้าที่ขับเคลื่อนอวัยวะต่าง ๆ ให้เคลื่อนไหว เช่น เมื่อต่อมอเตอร์เข้ากับข้อต่อหุ่นยนต์จะสามารถหมุนข้อต่อนั้นได้หรือต่อมอเตอร์เข้ากับชุดล้อหุ่นยนต์ก็จะสามารถขับเคลื่อนได้ มอเตอร์ไฟฟ้าแบบหมุนต่อเนื่องประกอบไปด้วย ๒ ส่วน คือ ส่วนที่อยู่กับที่หรือสเตเตอร์ (stator) และส่วนที่เคลื่อนที่หรือโรเตอร์ (rotor) โดยมีหลักการทำงาน คือ กระแสไฟฟ้าที่ถูกจ่ายเข้าไปเป็นพลังงานให้แก่มอเตอร์ทำให้เกิดสนามแม่เหล็กไฟฟ้าในขดลวดสเตเตอร์และขดลวดโรเตอร์ การผลักกันของสนามแม่เหล็กไฟฟ้าทั้งสองทำให้เพลาที่ต่ออยู่กับโรเตอร์หมุนอย่างต่อเนื่องไปเรื่อย ๆ และจะหยุดหมุนก็ต่อเมื่อปิดการจ่ายพลังงานไฟฟ้าหรือแรงหมุนของมอเตอร์ไม่สามารถเอาชนะภาระที่มากระทำต่อมอเตอร์ได้
มอเตอร์แบบลำดับขั้นหรือสเตปเปอร์มอเตอร์ (Stepper motor)
โดยทั่วไปแล้วมอเตอร์ไฟฟ้าจะมีการหมุนที่ต่อเนื่องและอาจไม่สะดวกมากนักหากต้องการสั่งการทำงานให้เคลื่อนที่เป็นองศาตามที่กำหนด มอเตอร์แบบลำดับขั้นจึงเป็นอีกทางเลือกหนึ่งที่สามารถนำไปใช้งานควบคุมทิศทางการหมุนตามตำแหน่งที่ต้องการได้หากตำแหน่งนั้นตรงกับลำดับขั้นของมอเตอร์พอดี ลักษณะการทำงานของมอเตอร์แบบลำดับขั้นจะต้องป้อนสัญญาณพัลส์ (pulse) ให้แก่ขดลวดสเตเตอร์ทำให้เกิดแรงผลักที่โรเตอร์จึงเกิดการหมุนของมอเตอร์แบบลำดับขั้น เมื่อหมุนครบ ๑ รอบจะเท่ากับ ๓๖๐ องศา ซึ่งถ้ามอเตอร์แบบลำดับขั้นมีการหมุนเท่ากับ ๕ องศาต่อขั้น ความละเอียดในการหมุนของมอเตอร์แบบลำดับขั้นตัวนี้จึงจะเท่ากับ ๗๒ ขั้นต่อรอบ ปัจจุบันมีการใช้งานมอเตอร์แบบลำดับขั้นอย่างแพร่หลายเพราะสามารถควบคุมการหมุนตำแหน่งใดก็ได้ เช่น หัวอ่านซีดีรอม ฮาร์ดดิสก์ ตลอดจนอุตสาหกรรมการผลิตต่าง ๆ เช่น หุ่นยนต์อุตสาหกรรม ระบบสายพาน

เซอร์โวมอเตอร์ (Servo motor)
เป็นมอเตอร์ชนิดพิเศษที่สามารถควบคุมให้ทำงานเฉพาะในตำแหน่งใดตำแหน่งหนึ่งได้โดยเซอร์โวมอเตอร์ประกอบด้วย มอเตอร์ไฟฟ้า เซ็นเซอร์จับตำแหน่งของเพลา และวงจรอิเล็กทรอนิกส์ที่ควบคุมมอเตอร์ คำว่า “เซอร์โว” มาจากระบบที่สามารถควบคุมพฤติกรรมของมันเองได้ซึ่งสามารถวัดตำแหน่งของตัวเองและชดเชยกำลังงานที่เสียไปด้วยสัญญาณควบคุมที่ป้อนกลับมามอเตอร์ชนิดนี้นิยมใช้ในงานที่ต้องการความแม่นยำของตำแหน่งสูง

ระบบนิวแมติก (Pneumatic)
ระบบนิวแมติก คือ ระบบกำลังของไหลที่ใช้แรงดันของอากาศเป็นตัวขับเคลื่อนอุปกรณ์ต่าง ๆ ให้เป็นพลังงานกล เช่น กระบอกสูบระบบนิวแมติก มอเตอร์ระบบนิวแมติก เนื่องจากของไหลที่ใช้ในการอัดคืออากาศซึ่งมีการอัดยุบตัวได้ ระบบนิวแมติกจึงไม่สามารถแบกรับน้ำหนักมากได้
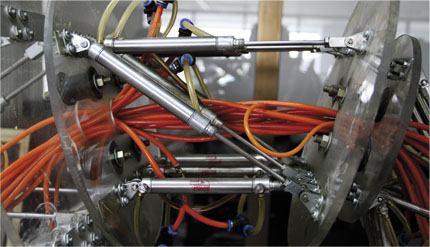
ระบบไฮดรอลิก (Hydraulic)
ระบบไฮดรอลิก คือ ระบบกำลังของไหลที่ใช้แรงดันของเหลวเป็นตัวขับเคลื่อนอุปกรณ์ต่าง ๆ ให้เป็นพลังงานกลโดยมีหลักการทำงานคล้ายระบบนิวแมติกแต่แตกต่างกันที่ของไหลที่ใช้ในการอัด เนื่องจากของไหลที่ใช้ในการอัดคือของเหลวซึ่งไม่มีการยุบตัว ระบบไฮดรอลิกจึงนิยมใช้ในงานที่ต้องใช้กำลังสูง

คือ อุปกรณ์ไฟฟ้าหรืออุปกรณ์ที่ใช้สัญญาณทางระบบไฟฟ้า เช่น อุปกรณ์ตรวจรู้ วงจรขับต่าง ๆ อุปกรณ์แสดงผล
อุปกรณ์ตรวจรู้ (Sensor)
อุปกรณ์ตรวจรู้หรือที่เรียกกันว่า เซ็นเซอร์ ใช้สำหรับตรวจวัดปริมาณของตัวแปรต่าง ๆ ที่ใช้ในการรับค่า (input) ปริมาณทางฟิสิกส์ เช่น แสง สี อุณหภูมิ เสียง แรง ความดัน ความหนาแน่น ระยะทาง ความเร็ว อัตราเร่ง ระดับความสูง อัตราการไหลแล้วแปลงปริมาณทางฟิสิกส์ที่ได้เป็นสัญญาณไฟฟ้าหรือปริมาณการวัดในรูปแบบที่สามารถนำไปประมวลผลต่อได้
อุปกรณ์ตรวจรู้เป็นส่วนที่สำคัญในการทำงานของหุ่นยนต์โดยเปรียบเสมือนประสาทสัมผัสในการทำงานของมนุษย์ เช่น อุปกรณ์ตรวจรู้แสงที่ทำหน้าที่เหมือนตาโดยเปลี่ยนแสงและสีที่รับเข้ามาเป็นสัญญาณไฟฟ้าแล้วส่งต่อให้ระบบประมวลผล อุปกรณ์ตรวจรู้มีหลายชนิดขึ้นอยู่กับสิ่งที่จะตรวจวัด เช่น อุปกรณ์ตรวจรู้อินฟราเรดที่ใช้บอกตำแหน่งโดยการสะท้อนของคลื่นแสงที่มีความถี่ต่ำกว่าแสงสีแดง อุปกรณ์ตรวจรู้อัลตราโซนิกใช้บอกตำแหน่งโดยการสะท้อนของคลื่นเสียงที่มีความถี่สูง เลเซอร์เรนจ์ไฟน์เดอร์ (laser rangefinder sensor) ใช้ในการกะระยะนำทางโดยใช้แสงเลเซอร์ อุปกรณ์ตรวจรู้ระบบจีพีเอส (GPS: Global Positioning System) ใช้ในการบอกตำแหน่งโดยใช้การอ้างอิงจากดาวเทียม นอกจากนี้ยังมี
เอนโคดเดอร์ (Encoder)
เอนโคดเดอร์เป็นอุปกรณ์ตรวจรู้รูปแบบหนึ่งที่มีความสำคัญมากเพราะใช้ในการวัดมุมเพลาของมอเตอร์ เอนโคดเดอร์ประกอบด้วยจานหมุนและอุปกรณ์ตรวจจับที่จานหมุนจะมีช่องเล็ก ๆ ซึ่งเมื่อเพลาของมอเตอร์หมุนจะทำให้จานหมุนไปตัดลำแสงของอุปกรณ์ตรวจจับส่งผลให้ชุดไฟฟ้ารับแสงมีการรับสัญญาณเป็นช่วง ๆ สัญญาณไฟฟ้าที่ได้จึงมีลักษณะเป็นพัลส์ (pulse) ซึ่งสัญญาณพัลส์จะแปรผันตรงกับการหมุนของเพลาของมอเตอร์ที่มีอยู่ ๒ ชนิด คือ
๑) เอนโคดเดอร์ อินคริเมนต์ (incremental encoder) โดยทั่วไปเรียกว่า เอนโคดเดอร์แบบโรตารี (rotary encoder) เป็นเอนโคดเดอร์แสดงความเร็วสัญญาณที่ได้จะเป็นสัญญาณแบบดิจิทัลซึ่งง่ายต่อการแปลผล
๒) เอนโคดเดอร์แบบสัมบูรณ์ (absolute encoder) หรือโดยทั่วไปเรียกว่า โพเทนทิโอมิเตอร์ (potentiometer) ซึ่งทำงานคล้ายกับเอนโคดเดอร์แบบโรตารีแต่สัญญาณที่ได้จะเป็นเลขฐานสอง (binary) การใช้งานจึงยากกว่าเอนโคดเดอร์แบบโรตารีแต่ให้ความเที่ยงตรงและสามารถบอกทุกตำแหน่งของการเคลื่อนที่ได้

อุปกรณ์แสดงผล (Output device)
อุปกรณ์แสดงผล คือ อุปกรณ์ที่ใช้แสดงค่าสถานะต่าง ๆ ของหุ่นยนต์ให้มนุษย์ทราบซึ่งมีอยู่หลายรูปแบบ เช่น จอภาพที่ใช้บอกสถานะด้วยภาพ ลำโพงที่ใช้บอกสถานะด้วยเสียงหรือแม้กระทั่งหลอดไฟก็ใช้บอกสถานะของหุ่นยนต์ได้เช่นกัน
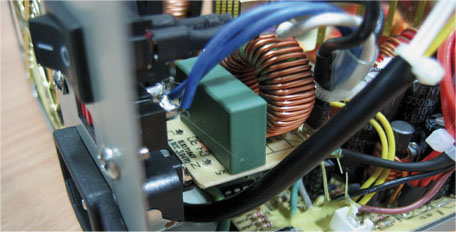
ชุดขับมอเตอร์ (Motor driver)
เป็นส่วนสำคัญที่จะทำให้มอเตอร์เกิดการหมุน ส่วนใหญ่การทำงานของชุดขับเหมือนกับการทำงานของสวิตช์ที่เปิด-ปิดตามสัญญาณที่ชุดควบคุมส่งออกมา ชุดขับมอเตอร์ใช้ในการควบคุมตำแหน่งและความเร็วของมอเตอร์ เช่น การขับมอเตอร์ไฟฟ้ากระแสตรง ความเร็วของการหมุนขึ้นอยู่กับขนาดของแรงดัน และกระแสไฟฟ้าที่จ่ายให้แก่มอเตอร์แต่แรงดันและกระแสไฟฟ้าที่ป้อนให้ ต้องไม่เกินค่าที่มอเตอร์สามารถรับได้ด้วยมิฉะนั้นจะทำให้เกิดความร้อนที่ตัวของมอเตอร์และเกิดความเสียหายขึ้นได้ ส่วนทิศทางการหมุนของมอเตอร์ขึ้นอยู่กับขั้วของแหล่งจ่ายที่ป้อนเข้าไป


คือ สมองกลที่ควบคุมการทำงานของหุ่นยนต์ เช่น สมองกลที่ประดิษฐ์จากอุปกรณ์อิเล็กทรอนิกส์ เครื่องควบคุมขนาดเล็ก คอมพิวเตอร์ชนิดแผงวงจรสำเร็จรูป เครื่องควบคุมเชิงตรรกะที่สามารถสร้างโปรแกรมได้ คอมพิวเตอร์ส่วนบุคคล
สมองกลที่ประดิษฐ์จากอุปกรณ์อิเล็กทรอนิกส์
ความแตกต่างระหว่างหุ่นยนต์กับเครื่องจักรกลทั่วไป คือ หุ่นยนต์มีระดับขั้นการทำงานด้วยตัวเองสูงกว่าเครื่องจักรกล สมองกลของหุ่นยนต์เปรียบได้กับสมองของมนุษย์ซึ่งหากหุ่นยนต์ไม่มีสมองกลไว้สั่งการก็อาจเดินไปชนฝาผนังหรือสิ่งต่าง ๆ ได้ ในการควบคุมหุ่นยนต์ที่ไม่มีเงื่อนไขการทำงานมากนักสามารถใช้อุปกรณ์อิเล็กทรอนิกส์พื้นฐาน เช่น ตัวต้านทาน ตัวเก็บประจุ ตัวเหนี่ยวนำ ทรานซิสเตอร์ อุปกรณ์ตรวจรู้มาประกอบกันเป็นวงจรควบคุมการทำงานของหุ่นยนต์ได้
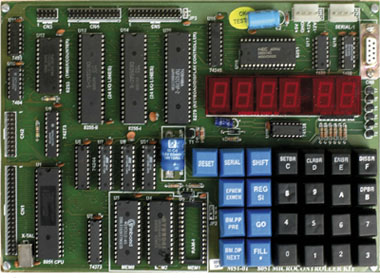
เครื่องควบคุมขนาดเล็ก (Microcontroller)
หุ่นยนต์ที่มีเงื่อนไขของการทำงานมากขึ้นจำเป็นต้องเพิ่มความสามารถให้แก่สมองกลของหุ่นยนต์ ดังนั้นจึงได้มีการคิดค้นเครื่องควบคุมขนาดเล็กขึ้นมาเพื่อแทนที่วงจรอิเล็กทรอนิกส์และด้วยพื้นฐานดังกล่าวเครื่องควบคุมขนาดเล็กจึงสามารถเปลี่ยนแปลงเงื่อนไขการทำงานได้ง่ายโดยการเปลี่ยนโปรแกรมลำดับการควบคุมบนเครื่องคอมพิวเตอร์ส่วนบุคคล นอกจากนี้ราคาไม่แพงต้องการแหล่งจ่ายไฟต่ำเครื่องควบคุมขนาดเล็กจึงเป็นที่นิยมใช้กันมากสำหรับการสร้างสมองกลให้แก่หุ่นยนต์
คอมพิวเตอร์ชนิดแผงวงจรสำเร็จรูป (Single Board Computer: SBC)
เป็นเครื่องควบคุมที่มีการทำงานเหมือนกับคอมพิวเตอร์ส่วนบุคคลเพียงแต่ทุกอย่างจะย่อลงมาให้อยู่ในแผงวงจรเล็ก ๆ เพียงแผงเดียวซึ่งนิยมใช้ในหุ่นยนต์ที่มีเงื่อนไขในการทำงานมากหรือมีการควบคุมที่ซับซ้อน

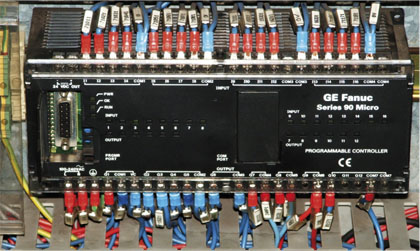
เครื่องควบคุมเชิงตรรกะที่สามารถสร้างโปรแกรมได้ หรือพีแอลซี (Programmable Logic Controller : PLC)
เครื่องควบคุมเชิงตรรกะที่สามารถสร้างโปรแกรมได้ถูกคิดค้นและพัฒนาขึ้นมาเพื่อทดแทนวงจรรีเลย์ (relay) ของการควบคุมระบบอัตโนมัติซึ่งนิยมใช้กันมากในโรงงานอุตสาหกรรมเนื่องจากมีความทนทานต่อสภาพแวดล้อมในโรงงานอุตสาหกรรม ใช้งานสะดวกและปรับเปลี่ยนการทำงานได้ง่ายรวมทั้งสามารถใช้งานได้อย่างอเนกประสงค์และง่ายต่อการบำรุงรักษา
คอมพิวเตอร์ส่วนบุคคล (Personal Computer: PC)
คอมพิวเตอร์ส่วนบุคคลเป็นเครื่องควบคุมระดับสูงซึ่งสามารถปรับเปลี่ยนการทำงานของหุ่นยนต์ได้อย่างหลากหลายมีประสิทธิภาพมากที่สุดในบรรดาเครื่องควบคุมทั้งหมดที่กล่าวมาแต่ไม่นิยมใช้ในหุ่นยนต์ทั่วไปมากนักเนื่องจากมีขนาดใหญ่ น้ำหนักมาก และต้องการพลังงานสูง