4,983 Views
4,983 Viewsการเคลื่อนที่ (locomotion) หมายถึง การกระทำด้วยกำลังเพื่อให้เกิดการเคลื่อนที่จากที่หนึ่งไปยังอีกที่หนึ่ง ส่วนใหญ่แล้วการเคลื่อนที่ของหุ่นยนต์จะพิจารณาออกแบบตามวัตถุประสงค์ของการใช้งานและสภาพการทำงานของหุ่นยนต์เป็นสำคัญ หากหุ่นยนต์ใช้ในโรงงานอุตสาหกรรมซึ่งงานส่วนใหญ่เป็นงานที่ทำในขอบเขตจำกัดการเคลื่อนที่ของหุ่นยนต์ก็ไม่มีความจำเป็นจึงออกแบบให้มีลักษณะเป็นแขนกลชนิดติดตั้งอยู่กับที่แต่หากเป็นงานเชิงสำรวจงานตรวจการณ์หรือมีขอบเขตการทำงานกว้างและต้องเคลื่อนที่ไปยังตำแหน่งต่าง ๆ ก็จะออกแบบหุ่นยนต์ให้สามารถเคลื่อนที่ได้ความสามารถในการเคลื่อนที่ (mobility) หมายถึง ความสามารถของระบบขับเคลื่อนที่จะนำพาหุ่นยนต์ให้เคลื่อนที่ไปบนพื้นผิวและผ่านสิ่งกีดขวางต่าง ๆ
การเคลื่อนที่ของหุ่นยนต์สามารถแบ่งเป็นประเภทใหญ่ ๆ ได้ดังนี้
๑) การเคลื่อนที่โดยใช้ล้อ (Wheel-drive locomotion)
คือ หุ่นยนต์ที่ใช้ล้อในการเคลื่อนที่เหมาะสำหรับหุ่นยนต์ทั่วไปที่ใช้งานบนพื้นราบซึ่งมีข้อดี คือ หุ่นยนต์สามารถเคลื่อนที่ได้อย่างรวดเร็ว มีการควบคุมง่าย ดังนั้นส่วนใหญ่หุ่นยนต์จึงถูกสร้างให้เคลื่อนที่โดยใช้ล้อแต่ข้อจำกัดของการเคลื่อนที่ในลักษณะนี้คือหุ่นยนต์ไม่สามารถไปในพื้นที่ต่างระดับได้และการเดินทางในพื้นที่ขรุขระเป็นไปอย่างยากลำบาก

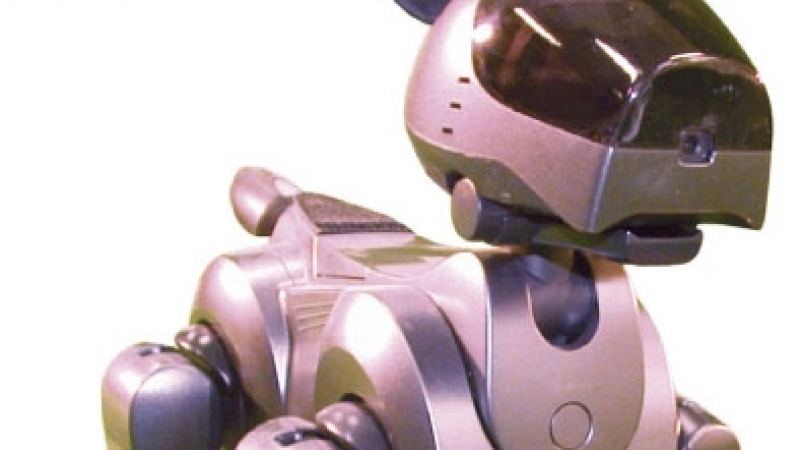
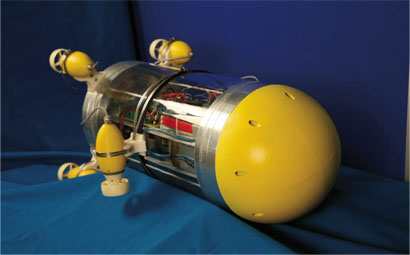
๒) การเคลื่อนที่โดยใช้ล้อสายพาน (Track-drive locomotion)
คือ หุ่นยนต์ที่ใช้ล้อสายพานในการเคลื่อนที่เหมาะสำหรับหุ่นยนต์ที่ใช้งานในพื้นที่ขรุขระหรือพื้นที่ที่มีความต่างระดับ ส่วนการควบคุมสามารถทำได้ง่ายเหมือนหุ่นยนต์ที่ใช้ล้อทั่วไปแต่มีข้อจำกัดคือ ไม่สามารถเคลื่อนที่ด้วยความเร็วสูงและอาจก่อให้เกิดความเสียหายต่อพื้นผิวบริเวณที่หุ่นยนต์เคลื่อนที่ไปเนื่องจากการตะกุยของล้อสายพาน
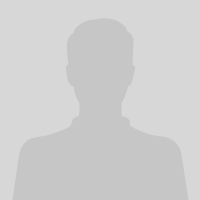
๓) การเคลื่อนที่โดยใช้ขา (Legged locomotion)
คือ หุ่นยนต์ที่ใช้ขาในการเคลื่อนที่โดยเลียนแบบจากสิ่งมีชีวิต เช่น หุ่นยนต์เดิน ๔ ขา หรือหุ่นยนต์เดิน ๒ ขา ข้อดี คือ หุ่นยนต์สามารถไปได้ในทุกที่หรือทุกสภาพพื้นผิวสามารถก้าวข้ามผ่านสิ่งกีดขวางต่าง ๆ ได้ และมีความสามารถในการเคลื่อนที่ดีกว่าล้อ ส่วนข้อจำกัดคือการเคลื่อนที่ช้า การควบคุมทำได้ยากลำบากกว่าการเคลื่อนที่แบบใช้ล้อมากและการรักษาสมดุลเป็นสิ่งที่จำเป็นมากสำหรับหุ่นยนต์ประเภทนี้โดยเฉพาะหุ่นยนต์ที่ใช้ ๒ ขาในการเคลื่อนที่
๔) การเคลื่อนที่โดยการบิน (Flight locomotion)
คือ หุ่นยนต์ที่ใช้ปีกหรือใบพัดในการเคลื่อนที่หรือเรียกว่า หุ่นยนต์บิน ข้อดีของหุ่นยนต์บินคือเคลื่อนที่ได้รวดเร็วและสามารถเข้าไปในพื้นที่เสี่ยงภัยหรือพื้นที่ที่เข้าถึงได้ยากซึ่งงานส่วนใหญ่ของหุ่นยนต์ประเภทนี้คือการสำรวจหรือการตรวจการณ์ แต่มีข้อควรระวังคือเนื่องจากหุ่นยนต์บินมีระยะในการปฏิบัติงานได้ค่อนข้างไกลการควบคุมจากระยะไกลจึงเข้ามามีบทบาทอย่างมาก หากมีระบบการควบคุมไม่ดีพออาจทำให้เกิดความเสียหายต่อหุ่นยนต์ได้
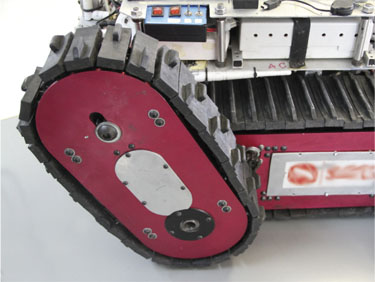
๕) การเคลื่อนที่ในน้ำ (Swimming locomotion)
คือ หุ่นยนต์ที่ใช้ใบพัดหรือครีบในการเคลื่อนที่และมีถังอับเฉาใช้ในการควบคุมการลอยตัวของหุ่นยนต์ ได้แก่ หุ่นยนต์ปลาและหุ่นยนต์เรือดำน้ำซึ่งส่วนใหญ่ใช้ในงานสำรวจแต่เนื่องจากการควบ คุมของการเคลื่อนที่ในน้ำนั้นไม่สามารถใช้ภาพในการนำทางได้จึงต้องใช้อุปกรณ์ตรวจรู้อย่างอื่นมานำทางแทน เช่น ระบบการสะท้อนกลับของคลื่นเสียงทำให้การควบคุมต้องมีความระมัดระวังเป็นอย่างมาก
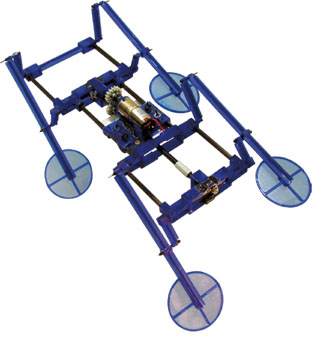
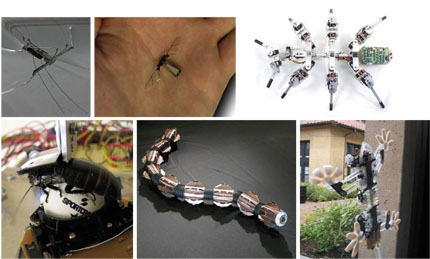
๖) การเคลื่อนที่รูปแบบอื่น (Other locomotion)
คือ หุ่นยนต์ที่ไม่ใช้ขาและล้อในการเคลื่อนที่ เช่น หุ่นยนต์งูจะใช้การรวมแรงลัพธ์ที่เกิดจากการบิดเคลื่อนที่ไปมาในแต่ละข้อ ขับดันให้เคลื่อนที่ไปข้างหน้า ข้อดีของหุ่นยนต์ประเภทนี้คือ สามารถไปได้ในทุกสภาพพื้นผิวทั้งยังสามารถขึ้นที่สูงและเข้าไปในที่แคบ ๆ ได้ จึงสามารถปฏิบัติงานได้อย่างหลากหลายและข้อดีอีกอย่างคือในแต่ละข้อต่อของหุ่นยนต์ที่ประกอบกันจะเหมือนกัน ดังนั้นถ้าข้อต่อใดเกิดความเสียหายขึ้นจะสามารถทดแทนด้วยข้อต่ออื่นได้ทันที
ในการเคลื่อนที่ของหุ่นยนต์ต้องคำนึงถึงวิธีการหรือรูปแบบของการเคลื่อนที่ด้วยเหตุผลหลายประการ เช่น เพื่อให้เกิดการใช้พลังงานในการเคลื่อนที่ต่ำที่สุด เพื่อให้หุ่นยนต์มีความสามารถในการหลบหลีกสิ่งกีดขวางหรือเพื่อให้เกิดเสถียรภาพในขณะเคลื่อนที่
ท่าการเคลื่อนที่ (gait, locomotion gait) หมายถึง รูปแบบของการเคลื่อนไหวเพื่อให้เกิดการเคลื่อนที่ซึ่งแบ่งออกเป็นท่าการเคลื่อนที่อย่างง่ายและท่าการเคลื่อนที่ประกอบโดยท่าการเคลื่อนที่ประกอบอาจประกอบด้วยท่าการเคลื่อนที่อย่างง่าย ๒ ท่าขึ้นไป วิธีการเคลื่อนที่ขึ้นอยู่กับชนิดของตัวขับเคลื่อน เช่น การเคลื่อนที่ของหุ่นยนต์ ๔ ขา (quadruped robot) มีท่าการเคลื่อนที่ ๓ แบบ ในการทำให้ขาเคลื่อนที่เป็นคู่ ๆ ได้แก่ การเดินแบบกึ่งเดินกึ่งวิ่ง (trot) การเดิน (pace) และการกระโดด (bound)
เสถียรภาพ (stability) คือ ความสามารถในการรักษาตำแหน่งหรือเส้นทางที่กำหนดภายใต้การรบกวนจากสิ่งเร้าภายนอก ในทางวิศวกรรมเสถียรภาพในการควบคุมจะสัมพันธ์กับจุดสมดุลเสมอ ซึ่งจุดสมดุล (equilibrium point) คือ จุดที่มีความเร็วเป็นศูนย์ในขณะที่ไม่มีแรงภายนอกหรือสัญญาณรบกวนมากระทำ
จุดสมดุลสามารถแบ่งออกเป็น ๓ ชนิด ได้แก่
๑. จุดสมดุลที่มีเสถียรภาพ (stable equilibrium point) คือ วัตถุไม่ได้เคลื่อนที่ออกไปไกลจากจุดสมดุลที่เกินกว่าขอบเขตที่กำหนดให้
๒. จุดสมดุลที่มีเสถียรภาพแบบลู่เข้า (asymptotically stable equilibrium point) คือ วัตถุจะลู่เข้าสู่จุดสมดุลเสมอ
๓. จุดสมดุลที่ไม่มีเสถียรภาพ (unstable equilibrium point) คือ วัตถุจะเคลื่อนที่ออกไปไกลกว่าขอบเขตที่กำหนด
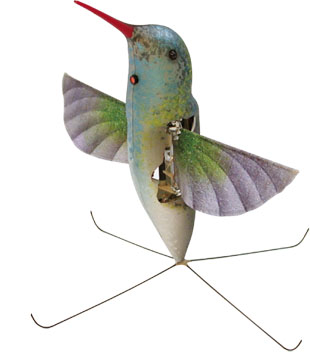
การพัฒนาเกี่ยวกับการเคลื่อนที่ของหุ่นยนต์เลียนแบบธรรมชาติเริ่มเข้ามามีบทบาทมากขึ้น เช่น การออกแบบหุ่นยนต์เคลื่อนที่โดยใช้ ๒ ขาเหมือนมนุษย์ การออกแบบหุ่นยนต์เคลื่อนที่ใต้น้ำโดยอาศัยหางและครีบที่โบกไปมาเหมือนปลาหรือหุ่นยนต์ที่บินได้โดยอาศัยปีกที่กระพือเหมือนปีกนกซึ่งจะเห็นได้ว่ากลไกการเคลื่อนที่ของธรรมชาติล้วนอาศัยกลไกการเคลื่อนที่แบบกลับไปกลับมาเนื่อง จากกล้ามเนื้อของสิ่งมีชีวิตมีระยะยืด-หดที่จำกัด ต่างจากต้นกำลังในหุ่นยนต์ซึ่งส่วนมากจะใช้มอเตอร์ที่ใช้การหมุนเป็นหลัก การเคลื่อนที่ในลักษณะกลับไปกลับมาที่หางหรือปีกของสัตว์จะสร้างกระแสหมุนวน (vortex) ของของไหลอย่างต่อเนื่อง กระแสหมุนวนนี้สร้างแรงขับดันอันมหาศาลจากการโบกขยับอวัยวะเพียงเล็กน้อยของสัตว์ได้อย่างไรและทำไมจึงมีประสิทธิภาพสูงกว่าระบบขับเคลื่อนที่มนุษย์สร้างขึ้นประเด็นนี้ยังคงเป็นปริศนาและต้องให้นักวิทยาศาสตร์ค้นคว้าหาคำตอบต่อไป